Next: Principal components: HMM-PCA
Up: Hidden Markov Models, etc.
Previous: Autoregressive observations: HMM-AR
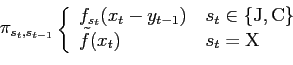
Outlier cleaning of time-series requires an extension of HMM-AR, section 7: Observations are the continuos variables  . A discrete state variable
. A discrete state variable
 represents the state of observation
represents the state of observation
 |
(35) |
and a second hidden variable  denotes the ``shadow path'' which needs to be tracked
when an observed quantity is identified as an outlier. The conditional probabilities are:
denotes the ``shadow path'' which needs to be tracked
when an observed quantity is identified as an outlier. The conditional probabilities are:
It is useful to re-factorise formulate the state probability
 |
(37) |
because then the forward recursion becomes
By re-factorising the update probability
 |
(41) |
it is possible to sample
 because the two terms have a simple form:
because the two terms have a simple form:
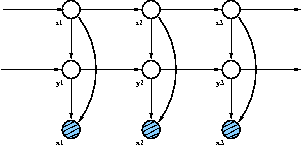
Fig.:
HMM-clean conditional dependencies.
|
|
Next: Principal components: HMM-PCA
Up: Hidden Markov Models, etc.
Previous: Autoregressive observations: HMM-AR
Markus Mayer
2009-06-22